
种子填充算法描述及C++代码实现
作者:网络转载 发布时间:[ 2014/10/14 13:30:21 ] 推荐标签:软件开发 C++
基于扫描线的算法,描述如下(也是针对二值图像编程的):
(1) 初始化一个空的栈用于存放种子点,将种子点(x, y)入栈;
(2) 判断栈是否为空,如果栈为空则结束算法,否则取出栈顶元素作为当前扫描线的种子点(x, y),y是当前的扫描线;
(3) 从种子点(x, y)出发,沿当前扫描线向左、右两个方向填充,直到边界。分别标记区段的左、右端点坐标为xLeft和xRight;
(4) 分别检查与当前扫描线相邻的y - 1和y + 1两条扫描线在区间[xLeft, xRight]中的像素,从xLeft开始向xRight方向搜索,若存在非边界且未填充的像素点,则找出这些相邻的像素点中右边的一个,并将其作为种子点压入栈中,然后返回第(2)步。
也是用的c++实现,代码如下:
1 //视频处理测试算法,种子填充算法,扫描线算法,二值图像
2 #include <iostream>
3 #include "cv.h"
4 #include "highgui.h"
5 #include <stack>
6 #include <list>
7 #include <string>
8
9 using namespace std;
10 int ScanLine_SeedFillingAlgoE(IplImage *src,IplImage *dst,int MinCutNumb);//原图像和目标图像不要是同一副图像
11 int main()
12 {
13 IplImage *ipl_origin;
14 IplImage *ipl_target;
15 string fname = "C:/Users/zcx/Desktop/打架斗殴测试图片/第四次无腐蚀膨胀/Fight1save";
16 cvNamedWindow("原始图片");
17 cvNamedWindow("处理后图片");
18 for (int k=0;k<246;k++)
19 {
20 string filename="";
21 char tmp[20];
22 _itoa_s(k,tmp,20,10);
23 filename+=tmp;
24 filename+=".bmp";
25 filename=fname+filename;
26 ipl_origin=cvLoadImage(filename.c_str(),-1);
27 //ipl_target=cvCreateImage(cvGetSize(ipl_origin),8,1);//cvCloneImage(ipl_origin);
28
29 //cvZero(ipl_target);
30 cvShowImage("原始图片",ipl_origin);
31 int s=clock();
32 ScanLine_SeedFillingAlgoE(ipl_origin,ipl_origin,125);
33 int e=clock();
34 std::cout<<" "<<e-s;
35 cvShowImage("处理后图片",ipl_origin);
36 cvWaitKey(1);
37
38 }
39
40
41
42
43
44
45 cvWaitKey(0);
46 cvReleaseImage(&ipl_origin);
47 //cvReleaseImage(&ipl_target);
48 cvDestroyWindow("原始图片");
49 cvDestroyWindow("处理后图片");
50
51 }
52 //MinCutNumb代表剔除面积小于MinCutNumb的值;
53 //返回找到目标数
54 int ScanLine_SeedFillingAlgoE(IplImage *src,IplImage *dst,int MinCutNumb)
55 {
56 int width = src->width;
57 int height = src->height;
58 int targetSumNumb=0;//目标数
59 int area;//区域面积
60 int rcount=0,lcount=0;//向左向右计算像素个数
61 int yLeft,yRight;//左右像素坐标
62 //IplImage *src=cvCreateImage(cvGetSize(p_src),8,1);//cvCloneImage(p_src);
63 //cvCopy(p_src,src);
64 CvPoint direction_4[]={{-1, 0}, {0, 1}, {1, 0}, {0, -1}};//上右下左
65 //CvPoint direction_8[] = { {-1, 0}, {-1, 1}, {0, 1}, {1, 1}, {1, 0}, {1, -1}, {0, -1}, {-1, -1} };//顺时针
66 int n_Count=sizeof(direction_4)/sizeof(CvPoint);//遍历方向个数
67 std::list<CvPoint> stk;//stl栈
68 std::list<CvPoint> lst;//stl链表
69
70 IplImage *tempimage=cvCreateImage(cvGetSize(src),8,1);//创建一个临时数据,保存源图像数据到目标过度数据
71 int t_i,t_j;//每次种子的位置
72 int rt_j,lt_j;//左右搜索
73 cvZero(tempimage);//临时数据初始化,清0
74 for (int i=1;i<height-1;i++)
75 {
76 for (int j=1;j<width-1;j++)
77 {
78 //int s=clock();
79
80 //
81 if (src->imageData[i*width+j])
82 {
83 targetSumNumb++;
84 stk.push_back(cvPoint(i,j));//栈换成链表
85 lst.push_back(cvPoint(i,j));
86 src->imageData[i*width+j]=0;//二值图像
87 //tempimage->imageData[i*width+j]=255;
88 area=1;
89 while (!stk.empty())
90 {
91 CvPoint seed=stk.back();//弹出头部
92 stk.pop_back();
93 t_i=seed.x;
94 rt_j=lt_j=t_j=seed.y;
95 if (t_i<=0||t_i>=height)//上下扫描界限
96 continue;
97 //向右扫描
98 rcount=0,lcount=0;
99 while (rt_j<width)
100 {
101 //++t_j;
102 if (src->imageData[t_i*width+(++rt_j)])
103 {
104 rcount++;
105 lst.push_back(cvPoint(t_i,rt_j));
106 src->imageData[t_i*width+rt_j]=0;//二值图像
107 }
108 else
109 {
110 break;
111 }
112 }
113 area+=rcount;
114 yRight=t_j+rcount;//右边坐标
115 //向左扫描
116 while (lt_j>0)
117 {
118 //++t_j;
119 if (src->imageData[t_i*width+(--lt_j)])
120 {
121 lcount++;
122 lst.push_back(cvPoint(t_i,lt_j));
123
124 src->imageData[t_i*width+lt_j]=0;//二值图像
125 }
126 else
127 {
128 break;
129 }
130 }
131 area+=lcount;
132 yLeft=t_j-lcount;//左边坐标
133 //上一行搜索入栈点
134 int up_yLeft=yLeft,up_yRight=yRight;
135 bool up_findNewSeed = false;//判断是否找到种子点
136 while(up_yLeft<=up_yRight)
137 {
138 up_findNewSeed = false;
139 while(src->imageData[(t_i-1)*width+up_yLeft]&&up_yLeft<width)
140 {
141 up_findNewSeed=true;
142 up_yLeft++;
143 }
144
145 if (up_findNewSeed)
146 {
147 if (up_yLeft==up_yRight)
148 {
149 stk.push_back(cvPoint(t_i-1,up_yLeft));
150 lst.push_back(cvPoint(t_i-1,up_yLeft));
151 src->imageData[(t_i-1)*width+up_yLeft]=0;//二值图像
152 }
153 else
154 {
155 stk.push_back(cvPoint(t_i-1,up_yLeft-1));
156 lst.push_back(cvPoint(t_i-1,up_yLeft-1));
157 src->imageData[(t_i-1)*width+up_yLeft-1]=0;//二值图像
158 }
159 up_findNewSeed=false;
160 }
161 int itemp=up_yLeft;
162 while (!src->imageData[(t_i-1)*width+up_yLeft]&&up_yLeft<up_yRight)
163 {
164 up_yLeft++;
165 }
166 if (itemp==up_yLeft)
167 {
168 up_yLeft++;
169 }
170 }
171
172 //下一行搜索入栈点
173 int down_yLeft=yLeft,down_yRight=yRight;
174 bool down_findNewSeed = false;//判断是否找到种子点
175 while(down_yLeft<=down_yRight)
176 {
177 down_findNewSeed = false;
178 while(src->imageData[(t_i+1)*width+down_yLeft]&&down_yLeft<width)
179 {
180 down_findNewSeed=true;
181 down_yLeft++;
182 }
183
184 if (down_findNewSeed)
185 {
186 if (down_yLeft==down_yRight)
187 {
188 ++area;
189 stk.push_back(cvPoint(t_i+1,down_yLeft));
190 lst.push_back(cvPoint(t_i+1,down_yLeft));
191 src->imageData[(t_i+1)*width+down_yLeft]=0;//二值图像
192 }
193 else
194 {
195 ++area;
196 stk.push_back(cvPoint(t_i+1,down_yLeft-1));
197 lst.push_back(cvPoint(t_i+1,down_yLeft-1));
198 src->imageData[(t_i+1)*width+down_yLeft-1]=0;//二值图像
199 }
200 down_findNewSeed=false;
201 }
202 int itemp=down_yLeft;
203 while (!src->imageData[(t_i+1)*width+down_yLeft]&&down_yLeft<down_yRight)
204 {
205 down_yLeft++;
206 }
207 if (itemp==down_yLeft)
208 {
209 down_yLeft++;
210 }
211
212 }
213
214
215
216
217
218
219
220 }
221 //int e=clock();
222 //std::cout<<e-s;
223 if (area>MinCutNumb)
224 {
225 //cvOr(dst,tempimage,dst);
226 while (!lst.empty())
227 {
228 CvPoint tmpPt=lst.front();
229 lst.pop_front();
230 tempimage->imageData[tmpPt.x*width+tmpPt.y]=255;
231 }
232 }
233 else
234 {
235 //std::list<CvPoint>().swap(lst);
236 //while (!lst.empty()) lst.pop_back();
237 //lst.resize(0);
238 //lst.
239 lst.clear();
240 }
241
242 }//判断是否入栈
243 //CvPoint
244
245 }
246 }
247 //cvZero(dst);
248 cvCopy(tempimage,dst);
249 cvReleaseImage(&tempimage);
250 return targetSumNumb;
251 }
效果如下图:
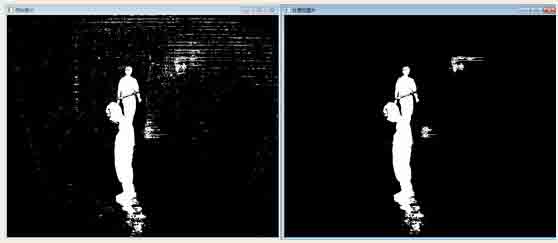
小结:去除小面积效果还好,这里实现两种算法的时间优化并不是很明显,自己编程实现效率并不是很高,仅供参考,有园友写的比较好的代码可以分享一下,大家互相学习。
本文内容不用于商业目的,如涉及知识产权问题,请权利人联系SPASVO小编(021-61079698-8054),我们将立即处理,马上删除。
相关推荐











更新发布
功能测试和接口测试的区别
2023/3/23 14:23:39如何写好测试用例文档
2023/3/22 16:17:39常用的选择回归测试的方式有哪些?
2022/6/14 16:14:27测试流程中需要重点把关几个过程?
2021/10/18 15:37:44性能测试的七种方法
2021/9/17 15:19:29全链路压测优化思路
2021/9/14 15:42:25性能测试流程浅谈
2021/5/28 17:25:47常见的APP性能测试指标
2021/5/8 17:01:11热门文章
常见的移动App Bug??崩溃的测试用例设计如何用Jmeter做压力测试QC使用说明APP压力测试入门教程移动app测试中的主要问题jenkins+testng+ant+webdriver持续集成测试使用JMeter进行HTTP负载测试Selenium 2.0 WebDriver 使用指南

 sales@spasvo.com
sales@spasvo.com